Cześć!
Jesteśmy grupą 10-ciu studentów Politechniki Częstochowskiej, specjalizującą się w budowie łazików marsjańskich. Jako zespół PCz Rover Team prężnie działamy od ponad 3 lat i odnieśliśmy w tym czasie niemałe sukcesy! Zbudowaliśmy już 3 łaziki i z każdym startowaliśmy na zawodach międzynarodowych w Polsce i USA. Konkurencja na świecie jest ogromna,
a my zawsze jesteśmy w ścisłej czołówce.
Nasze największe sukcesy to 6. miejsce podczas zawodów w USA oraz 4. miejsce na konkursie w Polsce. Przez ostatni rok pracowaliśmy dniami i nocami nad nowym łazikiem, którego nazwaliśmy Modernity.
Jego premiera odbędzie się w przeciągu kilku tygodni.
Dwa tygodnie temu zakwalifikowaliśmy się do finału zawodów University Rover Challenge 2017 w USA, które odbędą się na początku czerwca. Kandydowały 82 drużyny, w tym 10 z Polski. Przyjęto 36 zespołów, w tym 5 z naszego kraju:
Konkurs ten polega na udziale w czterech konkurencjach na pustyni w Utah, symulujących działanie robota na Marsie.
Film promocyjny zawodów:
Nasi partnerzy:
Zapraszamy na nasz fanpage na Facebooku: KLIK!
i na stronę internetową: KLIK!
Nasz zespół w mediach
Czego potrzebujemy by wziąć udział w tym prestiżowym wydarzeniu?
W związku z brakiem możliwości sfinansowania całości wyjazdu z uczelni szukamy wszelkich sposobów na pozyskanie funduszy, a głównym jest crowdfunding. Część środków już zebraliśmy, lecz nie jest to jeszcze wystarczające by polecieć do USA.
Kwota zbiórki to 25 000 PLN.
Za te pieniądze:
- zakupimy bilety lotnicze dla 5 członków zespołu
- dokupimy nadbagaż, w którym poleci łazik
- wynajmiemy na miejscu samochód
- zarezerwujemy miejsca w hotelu
Jakie przygotowaliśmy nagrody?
Przygotowaliśmy dla was multum nagród w podziękowaniu za wsparcie. Są to między innymi: imienne podziękowania, zespołowe gadżety takie jak smycze, przypinki, koszulki, zaproszenia na seminarium po zawodach w czerwcu, pocztówki czy kapelusz kowbojski z USA.
UWAGA: Wspierając nas daną kwotą otrzymujecie wszystkie nagrody, które przewidziane są dla tej kwoty + wszystkie nagrody przewidziane dla niższych kwot. Przykład:
Wpłacając 40 PLN otrzymujesz zaproszenie na seminarium, naklejkę z logiem łazika, Twoje imię i nazwisko na naszej stronie internetowej oraz imienne podziękowanie drogą mailową.
Jedną z nagród jest przejazd (na miejscu pasażera) repliką pojazdu Lotus 7, zbudowaną od zera przez Macieja Pierzgalskiego - członka zespołu mechaników:
Inną nagrodą jest zaproszenie na seminarium, na którym pokażemy jak wyglądają zawody w USA. Odbędzie się ono
w czerwcu (miejsce: Wydział Inżynierii Mechanicznej i Informatyki Politechniki Częstochowskiej, data do ustalenia).
Kilka słów o projekcie
Łazik marsjański to konstrukcja mobilna, której przeznaczeniem jest pomoc astronautom na Marsie. Jego zadaniem
w kosmosie będzie zbieranie informacji geologicznych, pobieranie próbek do badań, rozpoznawanie otaczającego terenu, wyręczanie człowieka w prostych czynnościach takich jak przewożenie narzędzi, przełączanie przełączników, tankowanie agregatu. Wszystkie wykonywane operacje są pół autonomiczne. Łazik sam na podstawie odczytów z konkretnych czujników reaguje na zastaną sytuacje.
W lipcu 2016 roku nasz łazik został wypożyczony do bazy marsjańskiej w Rzepienniku Biskupim, której budowa była przedmiotem innej akcji crowdfundingowej:
Aspekty techniczne
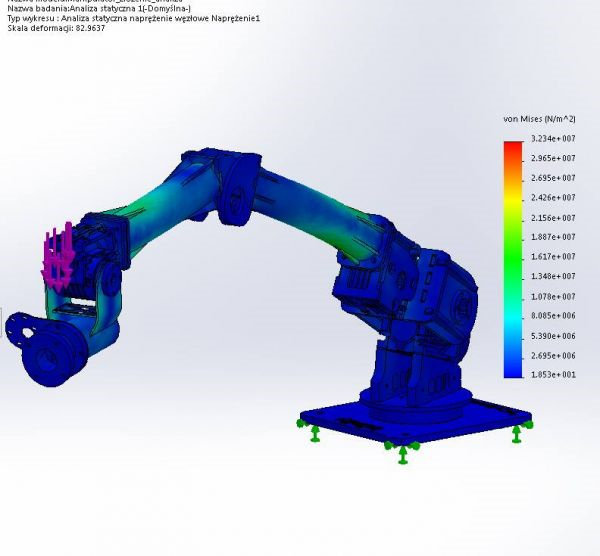
Po tamtych zawodach przystąpiliśmy do budowy całkiem nowego łazika, który będzie kamieniem milowym w rozwoju naszego zespołu. Jest to ultralekka konstrukcja zbudowana z aluminium lotniczego, poliamidu, oraz włókna węglowego. Sercem łazika są procesory ATmega oraz STM, które współpracują ze sobą za pomocą interfejsu RS-485. Modułowa architektura umożliwia łatwą modyfikacje układu oraz szybką wymianę podzespołów. Komunikacja łazika z operatorem jest oparta na łączności bezprzewodowej, m.in. Wi-Fi.
Taka transmisja sygnału i obrazu przekłada się na dużą niezawodność na obszarze na którym sterujemy łazikiem. Do operowania w terenie, mamy na pokładzie łazika manipulator, ramię o 5 stopniach swobody, zbudowane z aluminium. Manipulator jest kompaktowy, pozwala na bardzo szybką oraz precyzyjną pracę.
Pojazd jest wyposażony w GPS, magnetometr oraz akcelerometr, dzięki czemu znamy jego pozycję w terenie, orientację względem kierunków świata oraz nachylenie terenu na jakim się aktualnie znajduje. Dane te są bardzo ważne przy autonomicznej pracy łazika. Przejazd autonomiczny polega na samodzielnym poruszaniu się pojazdu z punktu do punktu.
Aby można było wykonać to zadanie, łazik ma na pokładzie zainstalowaną kamerę odpowiedzialną za analizę obrazu, która dostarcza wszelkich informacji o otoczeniu, w którym znajduje się pojazd. Odpowiednio zaimplementowany algorytm sprawia, że łazik orientuje się względem przeszkód oraz bramek, które musi samodzielnie pokonać. Aktualnie dopracowujemy algorytm autonomicznej jazdy oraz pracujemy nad kinematyką odwrotną manipulatora, która pozwoli na szybsze sterowanie ramieniem.
Z góry dziękujemy za okazaną pomoc!





